Motor driver module is a very important module to run motors in many applications. This is because we cannot directly run motors through the controllers or FPGA module as motors can draw high to very high current. So, in order to protect the controllers or FPGA boards, we need a motor controller driver module. L293D IC is very suitable for controlling the motors as it is having H-bridge mechanism to run the module in any direction.
This motor driver module is L293 IC based and it can run up to 4 motors if direction change is not required. If direction change is required, then this module can run two motors either in reverse direction or in forward direction.
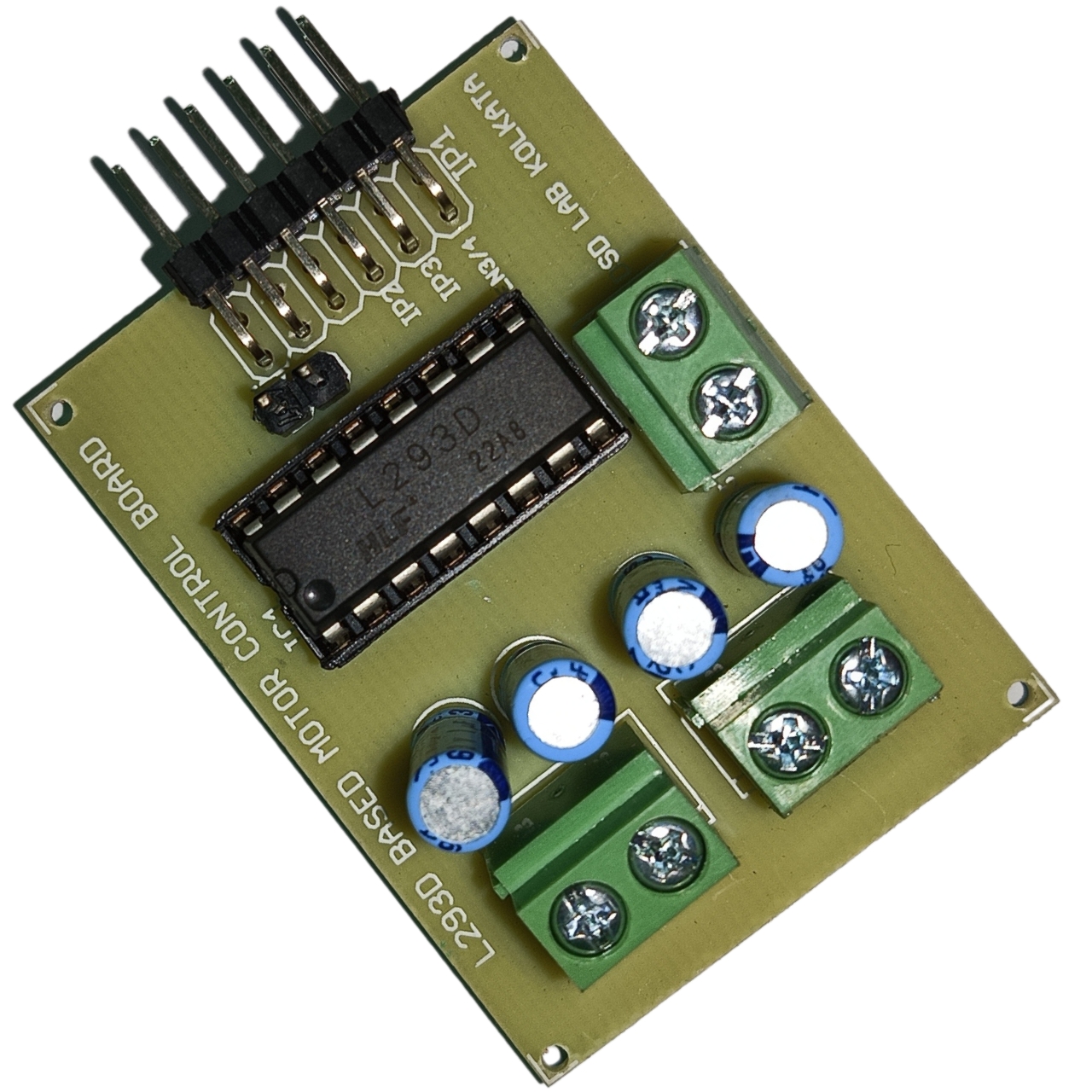
This module has PMOD connector which has 6 pins. PMOD connectivity helps user to connect this module to the FPGA boards easily as most of the FPGA boards are having PMOD connectors. This board is also easily compatible with any controller boards. PMOD connector has two pins for power (VCC1) and two connectors for GND. Among the other four connectors, 4 pins are reserved for control pins of the driver module like EN1/2, IP1, IP2, EN3/4, IP3, IP4. Speed of the motors are controlled by the PWM signal generated by the controllers or by the FPGA boards.
This module has three screw connectors, one for connecting the VCC2 to run the motors, one for connecting a motor, and other one is for connecting another motor. The motors are inductive load, and this is why this board is having four capacitors to protect the IC from back EMF. There is a jumper which is normally not connected. If this jumper is connected, then VCC1 and VCC2 get shorted. This facility is given on the board in order to help the user connect single supply to the board. If user wants to connect separate VCC2 and VCC1 then this jumper is open.

Reviews
There are no reviews yet.